
What?
The robotic arm is a mechanical device designed to replicate the movements and capabilities of a human arm. It consists of a series of joints or segments connected by servo motors.


How?
The robotic arm was constructed using an Arduino Mega, 8 servos, and a customized PCB board. Control is achieved through a specialized app created with the MIT App Inventor, providing an intuitive user interface for ease of use.
Result?
The arm successfully grabs objects over 2 lbs and is capable of performing repetitive tasks with a position accuracy of up to 1 mm.
Intelligent Robot

What?
The intelligent robot is equipped with six legs that allow it to traverse a variety of surfaces, making it capable of accessing smaller and more hazardous areas. Its top-mounted robotic arm facilitates the collection of research subjects.

How?
The robot was constructed using an Arduino Mega, 24 servos, and a customized PCB board. It is controlled via a specialized app created with the MIT App Inventor, providing an intuitive user interface.
Result?
The robot performed well during the research presentation. It can walk in all directions and on many surfaces that wheels cannot traverse. The top-mounted arm successfully grabs objects weighing over 1 lb.
Trion Solar Car

What?
Triton solar car is a road vehicle powered by the sun. The energy obtained from the sun through the solar panel. The chassis is the structure that form the backbone of the car and support all its components.

How?
The chassis was designed using SolidWorks and applied FEA for design validation. The component was made of steel pipe and welded using welding machine. Engineering calculations were performed to make sure the chassis can provide the foundation for the car suspension system, steering engine, and other essential part.

Result?
Successfully finish the main components of the chassis. The chassis meet the designed specification and requirement for racing application.
Ratwerk
What?
Ratwerk is a senior design project at UCSD where students used the same component to make the fastest and most efficient golf ball carrier using their knowledge in aerospace engineering. The project involves applying principles from various aerospace engineering courses, integrating design, development, and performance evaluation to achieve the best results. This capstone project highlights the practical application of aerospace education in solving real-world challenges.
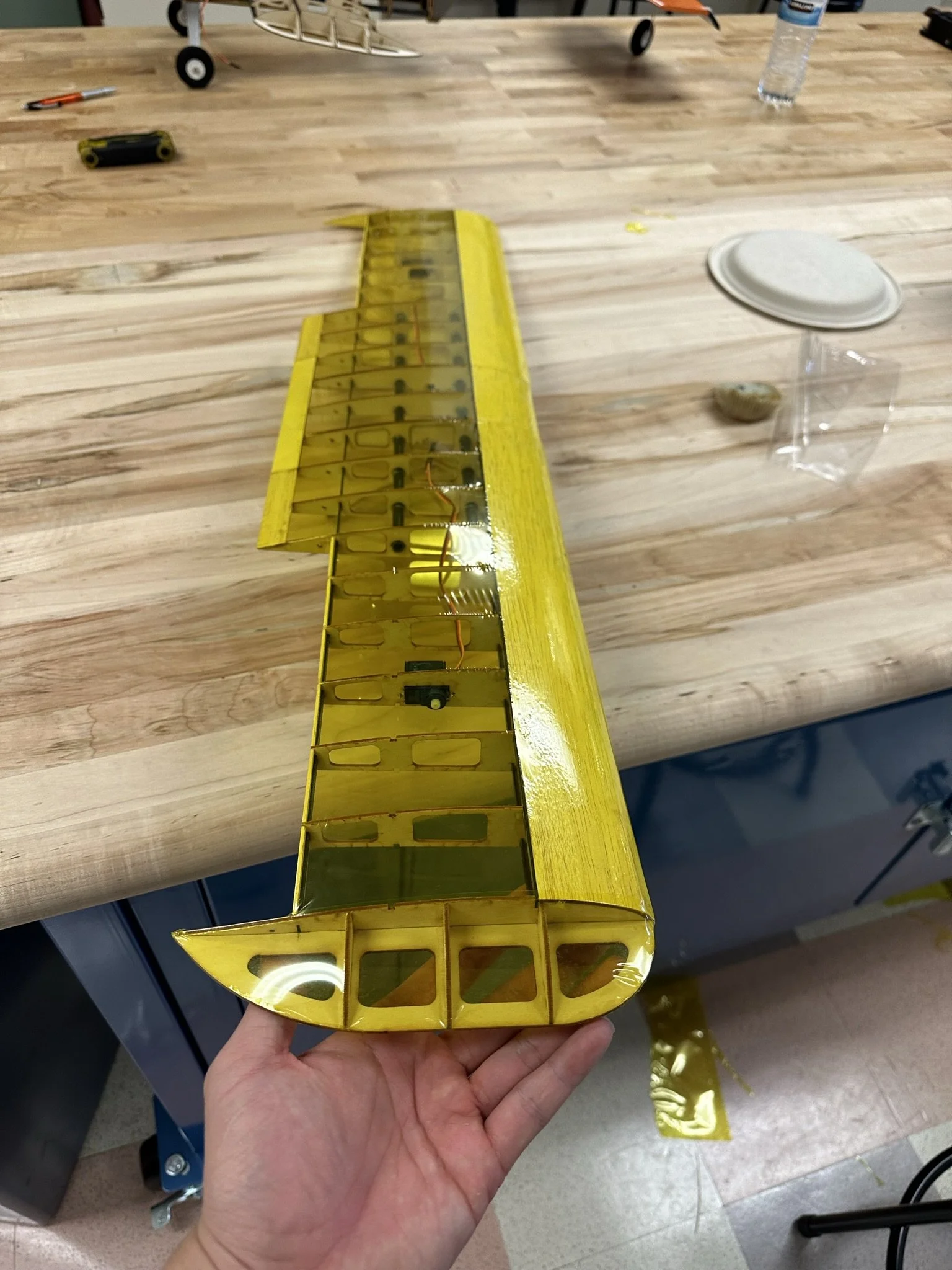

How?
The fuselage and wing structure of the Ratwerk project were modeled using SolidWorks and carefully analyzed to ensure an efficient strength-to-weight ratio through FEMAP. MATLAB calculations were performed to select the appropriate propellant that matches the motor's specifications. The design also incorporated vertical and horizontal controllers using servos for precise maneuverability.
Result?
The airplane successfully performed during the test flight. It was able to carry 18 golf balls and reached a maximum speed of 140 mph. This performance demonstrates the effectiveness of the design and the accurate integration of various components, ensuring both stability and speed.